Տեխնիկական բնութագրեր
| Ռեժիմ | Երեք կողմնային կնքում, յոթ սերվո, չորս սնուցող, գլխավոր մեքենայի սերվո, շարժական կրկնակի կտրվածք։ Ուլտրաձայնային սարքով։ |
| Հումք | BOPP, CPP, PET, նեյլոն, պլաստիկե լամինացված թաղանթ, բազմախաղացող էքստրուզիոն փչովի թաղանթ, մաքուր ալյումին, ալյումինե ծածկույթով լամինացված թաղանթ, թուղթ-պլաստմասե լամինացված թաղանթ |
| Առավելագույն պայուսակ պատրաստելու արագություն | 180 ժամանակ/րոպե |
| Նորմալ արագություն | 120 անգամ/րոպե (եռակողմանի կնիք 100-200 մմ) |
| 4 Առավելագույն նյութի դուրսբերման գծի արագություն | ≤35 մ/րոպե |
| Պայուսակի չափը | |
| Լայնություն | 80-580 մմ |
| Երկարություն | 80-500 մմ (կրկնակի մատակարարման գործառույթ) |
| Կնքման լայնությունը | 6-60 մմ |
| Պայուսակի ոճը | եռակողմ կնքման տոպրակ, կանգնած տոպրակ, կայծակաճարմանդով տոպրակ և չորս կողմնային կնքում |
| Նյութի գլանափաթեթի չափը | Ø 600*1250 մմ |
| Դիրքորոշման ճշգրտությունը | ≤±1 մմ |
| Ջերմային կնքման դանակի քանակը | Չորս թիմ՝ ուղղահայաց ջերմամեկուսացման համար, չորս թիմ՝ ուղղահայաց սառեցման համակարգի համար։ Երկու թիմ՝ կայծակաճարմանդային ջերմամեկուսացման դանակների համար, երկու թիմ՝ սառեցման սարքերի համար։ Երեք թիմ՝ հորիզոնական ջերմամեկուսացման համար, երկու թիմ՝ հորիզոնական սառեցման համակարգի համար։ |
| Ջերմաստիճանի կառավարման քանակը | 22 երթուղի |
| Ջերմաստիճանի կարգավորման միջակայքը | նորմալ և մինչև 360℃ |
| Ամբողջ մեքենայի հզորությունը | 45 կՎտ |
| Ընդհանուր չափսերը (երկարություն * լայնություն * բարձրություն) | 14100*1750*1900 |
| Ամբողջ մեքենայի զուտ քաշը | մոտ 6500 կգ |
| Գույն | Մեքենայի հիմնական մարմինը սև է, ծածկը՝ կաթնագույն։ |
| Շում ≤75 դԲ | |
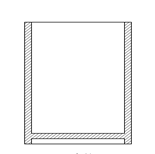
Եռակողմանի կնքում
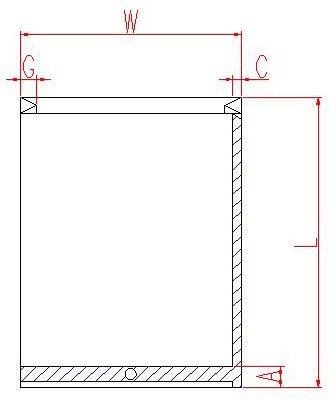
Չորս կողմի կնքումը
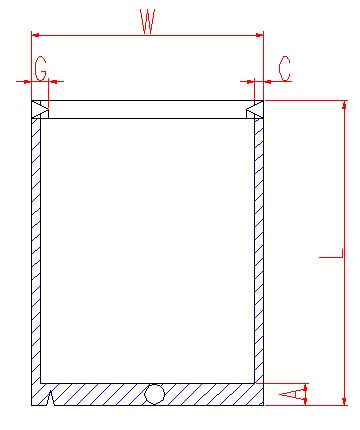
Չորս կողմի կնքումը
Կանգնեցնող պայուսակ
Կայծակաճարմանդով կանգնող պայուսակ
Տեխնիկական բնութագրեր և համապատասխան պարամետրեր
| Շրջանակի սարքը բացելը | |
| Կառուցվածք | Ուղղահայաց ավտոմատ սխալի շտկման կառուցվածքի թուլացում |
| Լարվածության կառավարում | |
| Մագնիսական հզորության արգելակային արգելակում | |
| Նախաձեռնող դուրս սնուցման կառուցվածք | |
| Կառավարման ռեժիմ | լողացող պարային գլանաձև սենսորը կարգավորում է կերակրման արագությունը |
| Ամուր ամրացված կոնաձև սնուցող լիսեռային գլան (օդով ընդարձակվող լիսեռով) | |
| Սխալների ուղղման կառավարում (EPC) | |
| Կառուցվածք | պտուտակային ձողի երկրորդային կարգավորում, K դարակի ուղղահայաց բարձրացում և անկում |
| Վարել | Պինդ վիճակի ռելեն վարում է ցածր արագության սինխրոն շարժիչ |
| Փոխանցում | պողպատե լիսեռի միացման միացում |
| Կառավարման տեսակը | արտացոլման էլեկտրական փոխակերպիչի հայտնաբերում, անկախ կառավարում։ |
| Հետևման ճշգրտությունը | 0.5 մմ |
| Կարգավորման միջակայք | 150 մմ |
| Հակառակ կողմի վերև և ներքև մասերը | |
| Կառուցվածք | գլանակի միակողմանի զսպանակային սեղմող կառուցվածքը |
| Կարգավորում | ձեռքով կարգավորում |
| Ուղղահայաց կնքման սարք | |
| Կառուցվածք | ուղղահայաց ցուցադրող երկաթի սեղմում, սառեցման հավաքման զսպանակային սեղմման կառուցվածք |
| Վարել | Գլխավոր մեքենան շարժում է էքսցենտրիկ մեխանիզմի միացման ձողը ուղղահայաց շարժում կատարելու համար |
| Քանակ | 4 թիմ՝ ջերմամեկուսացման, 4 թիմ՝ սառեցման համար |
| Երկարություն | 700 մմ |
| B ուղղահայաց կայծակաճարմանդ | |
| Կառուցվածք | Ուղղահայաց ցուցադրող երկաթի սեղմում, սառեցման հավաքածուի զսպանակային սեղմման կառուցվածք, ներքևի կնքման դանակ; ջերմային արդուկման պահիչը պնևմատիկորեն շարժվում է ներքև, երբ մեքենան կանգ է առնում: Ավտոմատ վերագործարկում, երբ մեքենան միանում է: |
| Վարել | Գլխավոր մեքենան շարժում է էքսցենտրիկ մեխանիզմի միացման ձողը ուղղահայաց շարժում կատարելու համար |
| Քանակ | 2 թիմ՝ ջերմամեկուսացման, 2 թիմ՝ սառեցման վրա |
| Հորիզոնական կնքման սարք | |
| Կառուցվածք | հորիզոնական ցուցադրող երկաթե սեղմիչ հավաքման զսպանակային կառուցվածք, սառեցման հավաքում |
| Վարել | Գլխավոր մեքենան շարժում է էքսցենտրիկ մեխանիզմի միացման ձողը ուղղահայաց շարժում կատարելու համար |
| Քանակ | երեք թիմ՝ ջերմամեկուսացման, երկու թիմ՝ սառեցման վրա |
| Երկարություն | 640 մմ |
| B Հորիզոնական հարթեցման սարք (կայծակաճարմանդի եզրի ջերմային հարթեցում) | |
| Կառուցվածք | հորիզոնական ցուցադրող երկաթե մամլիչի հավաքման զսպանակային կառուցվածք |
| Վարել | նույնն է՝ հորիզոնական կնքումը |
| Քանակ | 2 հավաքածու ջերմային սեղմման վրա |
| Ֆիլմի սնուցման սարք | |
| Կառուցվածք | ռետինե գլանային սեղմման շփման տեսակ |
| Վարել | ներմուծված լիովին թվային հոսքաջրերի արտադրության սերվոմեխանիզմ (Panasonic, Ճապոնիա) |
| Փոխանցում | համաժամանակյա գոտի և անիվ |
| Կառավարման ռեժիմ | կենտրոնացված PLC կառավարում, համաժամանակյա երկարության ֆիքսացիա և միջին լարվածության կառավարում |
| Կենտրոնական լարվածություն | |
| Կառուցվածք | լողացող լարվածության գլանաձև կառուցվածք |
| Կառավարման ռեժիմ | կենտրոնացված PLC կառավարում |
| Վերահսկողության մեխանիզմ | Լողացող լարվածության գլանակի շարժման լրացուցիչ միտումը վերահսկում է կենտրոնական սերվո շարժիչի քայլի երկարությունը՝ միաժամանակ կանգ առնելու և մեկնարկելու համար |
| Փորձարկման ռեժիմ | էլեկտրամագնիսականությունը մոտենում է անջատիչին (NPN) |
| Լարվածության կարգավորման միջակայքը | 0.1-0.2 մմ (համակարգչային կարգավորում, ավտոմատ փոխհատուցում) |
| Հիմնական փոխանցման սարքը | |
| Կառուցվածք | Շարժական ճոճանակի հրող և քաշող միացման ձողի կառուցվածքը |
| Վարել | 3 կՎտ հզորությամբ Panasonic սերվոշարժիչ։ |
| Փոխանցում | Գլխավոր փոխանցման էլեկտրական մեքենաների 1:10 գոտի ռեդուկտոր |
| Վերահսկողության մեթոդ | կենտրոնացված PLC կառավարում |
| Գործարկման ռեժիմ | Գլխավոր շարժիչը շարժում է շրջանակը՝ ուղղահայաց շարժում կատարելու համար |
| Ավտոմատ դիրքորոշման սարք | |
| Փորձարկման ռեժիմ | անդրադարձման ֆոտոէլեկտրական սենսորի հետևողական փորձարկում |
| Փորձարկման ճշգրտությունը | 0.01- 0.25 մմ |
| Ինտեգրատիվ դիրքավորման ճշգրտություն | ≤0.5-1 մմ |
| Ֆոտոէլեկտրական որոնման միջակայք | ±3 մմ |
| Ուղղորդող հավասարեցնող միջակայք | ±3 մմ |
| Դիրքորոշումը՝ ուղղելով իմաստուն կերպով | սերվո-թելերի հոսանքի հավասարեցում, ֆոտոէլեկտրական ավտոմատ շարժման ուղղման համակարգ |
| Ջերմաստիճանի կարգավորման կարգավորում | |
| Փորձարկման ռեժիմ | ջերմային զույգի փորձարկում |
| Կառավարման ռեժիմ | կենտրոնացված PLC կառավարում, PID կարգավորում, պինդ վիճակի ռելե |
| Ջերմաստիճանի կարգավորման միջակայքը | նորմալ -360℃ |
| Ջերմաստիճանի փորձարկման կետ | կենտրոնական մասը էլեկտրական ջեռուցմամբ |
| Կրկնակի կտրող դանակ (շարժական կրկնակի կտրող) | |
| Կառուցվածք | վերին կտրող դանակ + կարգավորման սարքավորում + ֆիքսված ներքևի կտրող դանակ |
| Ռեժիմ | զսպանակային կտրող դանակ |
| Փոխանցում | գլխավոր շարժիչի շարժիչ, էքսցենտրիկ մեխանիզմ՝ վեր ու վար շարժումով։ |
| Կարգավորում | հորիզոնական շարժում (երկու ծայրերով) |
| Կանգնած պայուսակի սարք |
| Ավտոմատ համաժամանակյա թուլացման համակարգ, թուլացման լարվածության ազատ կարգավորում, եռոտանու եզրերի ծալում։ |
| Ավտոմատ կլոր անցքերի փաթեթավորման սարք և ճշգրիտ դիրքավորում։ |
| Ավտոմատ կայծակաճարմանդ բացող սարք |
| Անկախ բացվող մեկ փոխանցման տուփի արագությունը նվազեցնող շարժիչի սնուցում |
| Ավտոմատ ֆոտոէլեկտրական կարգավորում, որը ապահովում է համաժամանակյա արագությունը հիմնական շարժիչի հետ |
| Դակիչ սարք (ընդունում է ներմուծված մասեր) | |
| Կառուցվածք | խոնարհված հենարանային պնևմատիկ շարժիչ, որը տանում է դեպի գլխավոր մոդելի հարվածային կառուցվածքը |
| Կառավարման ռեժիմ | կենտրոնացված PLC կառավարում |
| Վարել | Պինդ վիճակի ռելեային շարժիչների սոլենոիդի արժեքը |
| Դակիչ հենարանի քանակը | հիմնական երկու թիմեր (ռոմբուս) |
| Օդային բալոն | Էյրթաք, Թայվան |
| Եռակցման դանակի սարք | |
| Հորիզոնական: | 20մմ*2 շառավղով; 30մմ*2 շառավղով; 40մմ*2 շառավղով; 50մմ*2 շառավղով |
| Եզրը հետ պտտեցնել | |
| Էլեկտրամատակարարում | եռաֆազ 380V, ±10%, 50HZ հինգ գիծ |
| Հզորություն | 45 կՎտ |
| Օդի մատակարարում | ճնշում ≥ 0.6 ՄՊա |
| Սառեցնող ջուր | 3 լ/րոպե |